
从0入门自主空中机器人-5-Airsim-PX4仿真环境搭建

从0入门自主空中机器人-5-Airsim-PX4仿真环境搭建
MGodmonkeyAirSim项目地址:https://github.com/microsoft/AirSim
AirSim官方教程:Home - AirSim (microsoft.github.io)
CSDN参考教程: AirSim学习(1)安装Unreal Engine和AirSim
视频教程:
1.AirSim-Windows环境配置
注:Windows环境需要自行安装VS2022或以上版本,Unreal Engine >= 4.27(推荐4.27),以及wsl2(在Windows上运行Airsim,在wsl或者vm虚拟机上通过ros控制无人机)
安装虚拟引擎
1.【下载并安装EPIC】 ,虽然虚幻引擎是开源和免费下载的,但仍然需要注册
2.运行Epic Games Launcher,打开左侧窗格中的 “虚幻引擎” 选项卡。单击右上角的 “安装” 按钮,该按钮应显示下载 UE> = 4.27(推荐4.27) 的选项。选择安装位置以满足您的需求,如下图所示。如果您安装了多个版本的Unreal,请单击该版本的启动按钮旁边的向下箭头,以确保将您使用的版本设置为 “当前”。
Note: 如果您有UE 4.16或更旧的项目,请参阅 [升级指南](https:// microsoft.github.io/AirSim/unreal_upgrade/) 来升级您的项目。
安装VS2022
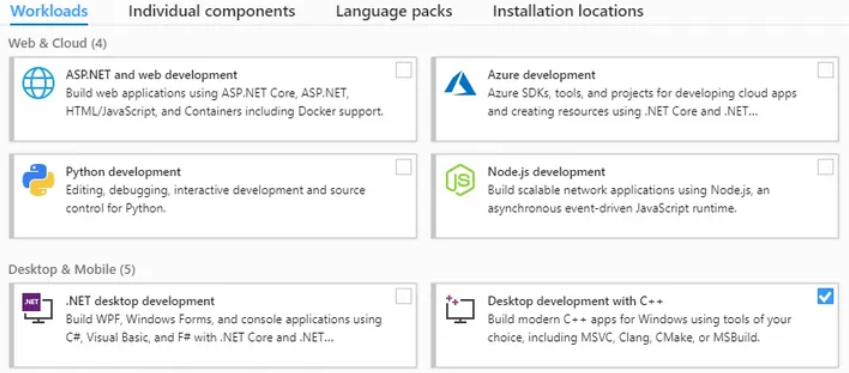
- 1.Visual Studio2022安装教程 (qq.com)。确保选择安装时勾选了C ++桌面开发 和**Windows 10 SDK 10.0.19041(如果是Windows11还需要选择Windows11的SDK)**进行桌面开发 (默认情况下应选择),然后选择最新的。NET Framework SDK下的 “单个组件” 选项卡,同时安装VS 2022。
Windows安装wsl2
- 参考这个教程安装(ubuntu版本选择20最好):Windows 11 安装 WSL2 - 知乎
1.1Build Airsim
下载源码到本地
1
2
3git clone https://github.com/microsoft/AirSim.git
# 国内网络环境不好时选择下面
git clone https://github.moeyy.xyz/https://github.com/microsoft/AirSim.git安装依赖项并编译
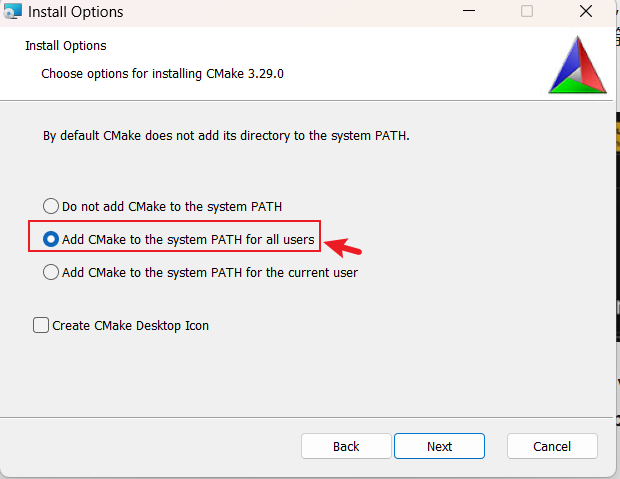
【下载并安装Cmake】,安装时记得勾选添加到环境中

安装Cmake完后重启电脑以生效环境,打开
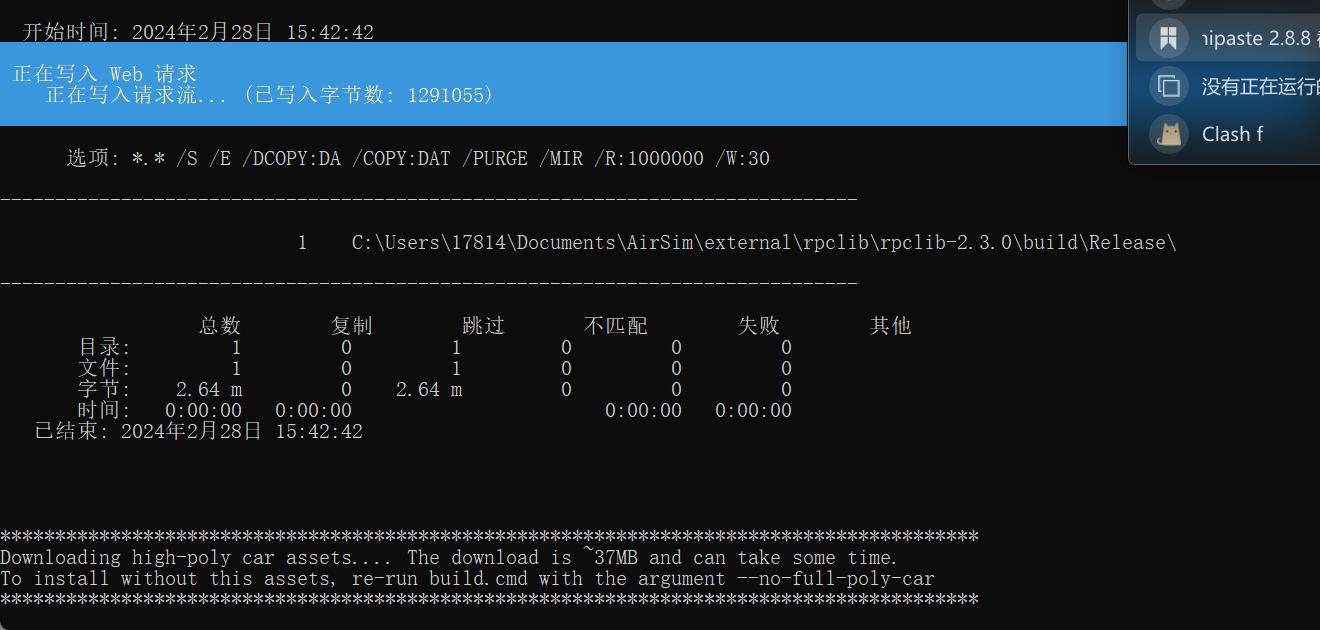
Developer Command Prompt for VS 2022,在Windows搜索中搜索然后使用管理员打开,cd AirSim记得cd进入Airsim所在的目录输入
.\build.cmd进行编译Airsim,如果在下面的过程中卡壳了,Ctrl+C终止编译,然后重新编译,直到下载完成并正常编译完成
使用VS2022编译打开
使用
Developer Command Prompt for VS 2022进入AirSim\Unreal\Environments\Blocks,执行.\update_from_git.bat双击打开
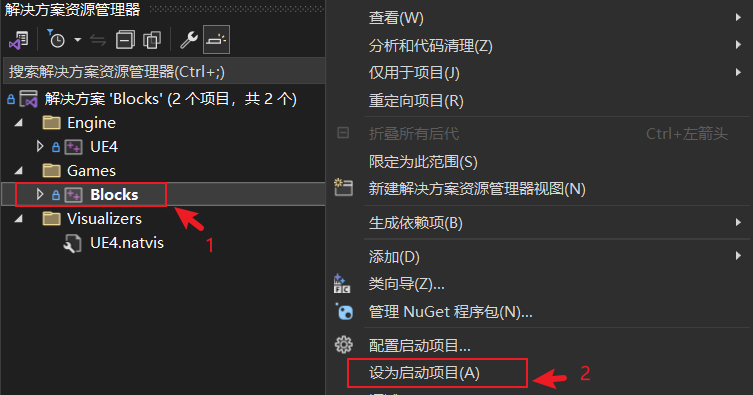
Blocks.sln,会自动启动VS2022右键
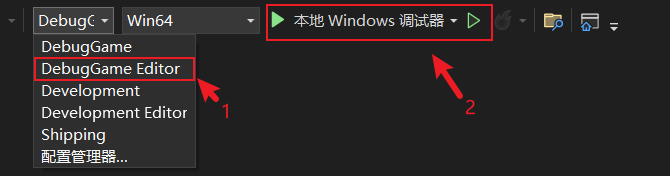
Block设为为启动项目编译器选择
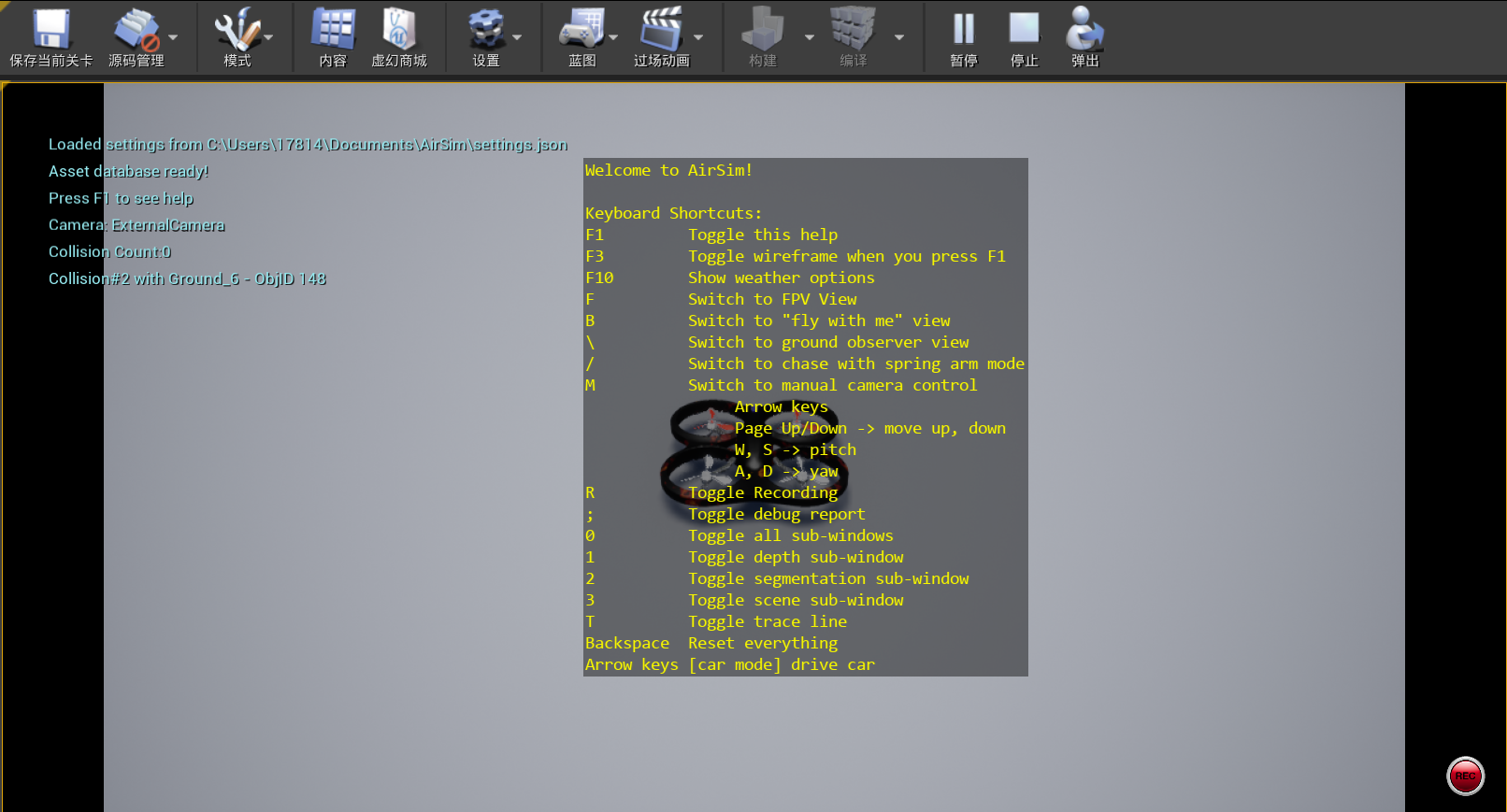
DebugGame Editor,然后启动本地Windows调试器,编译完成自动打开虚幻引擎点击运行,点击**‘是’选择仿真车,点击’否’**选择仿真无人机,当出现下面的画面则表示环境搭建成功
1.2自定义场景
创建一个自定义的虚拟场景,并通过Airsim加载
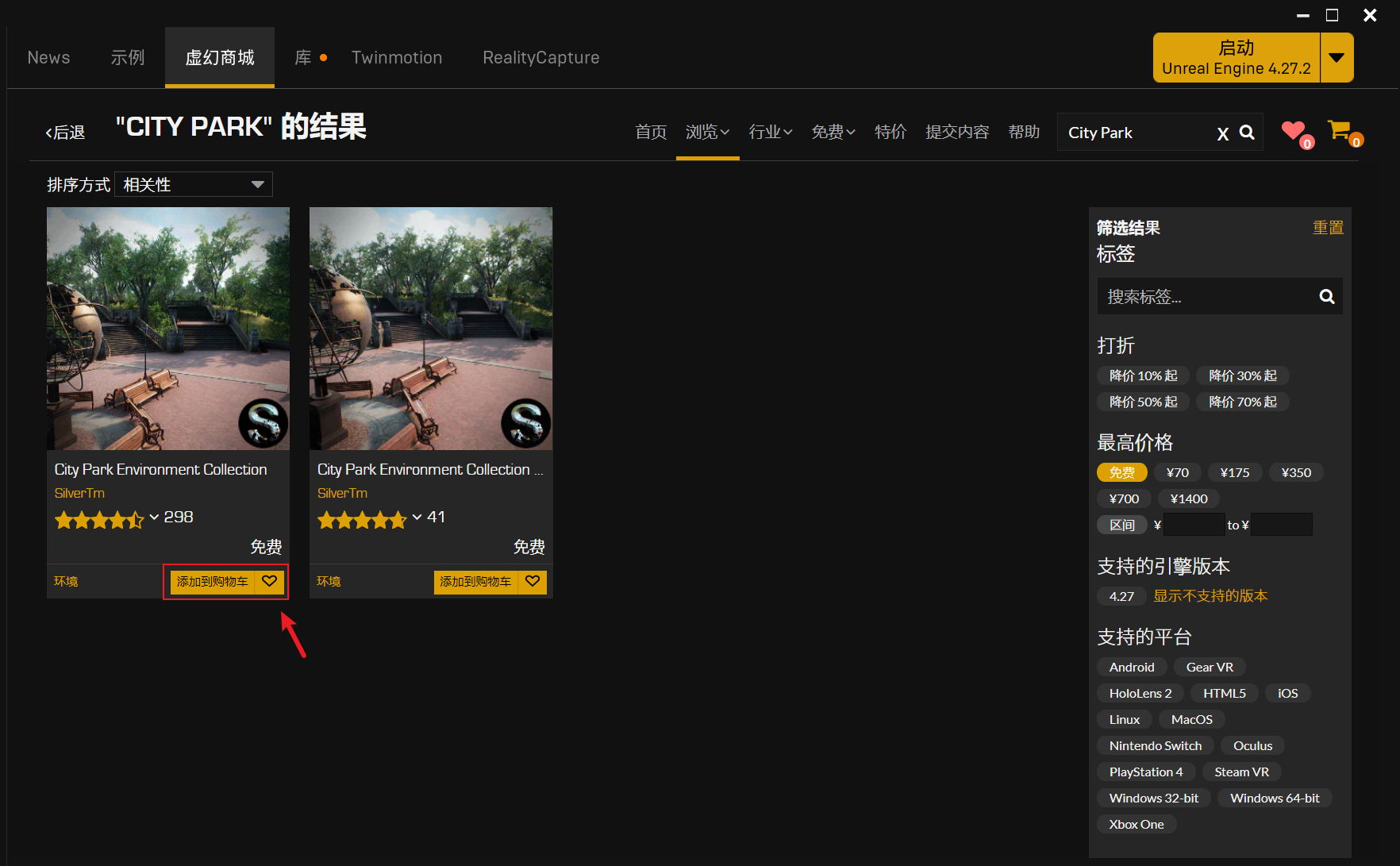
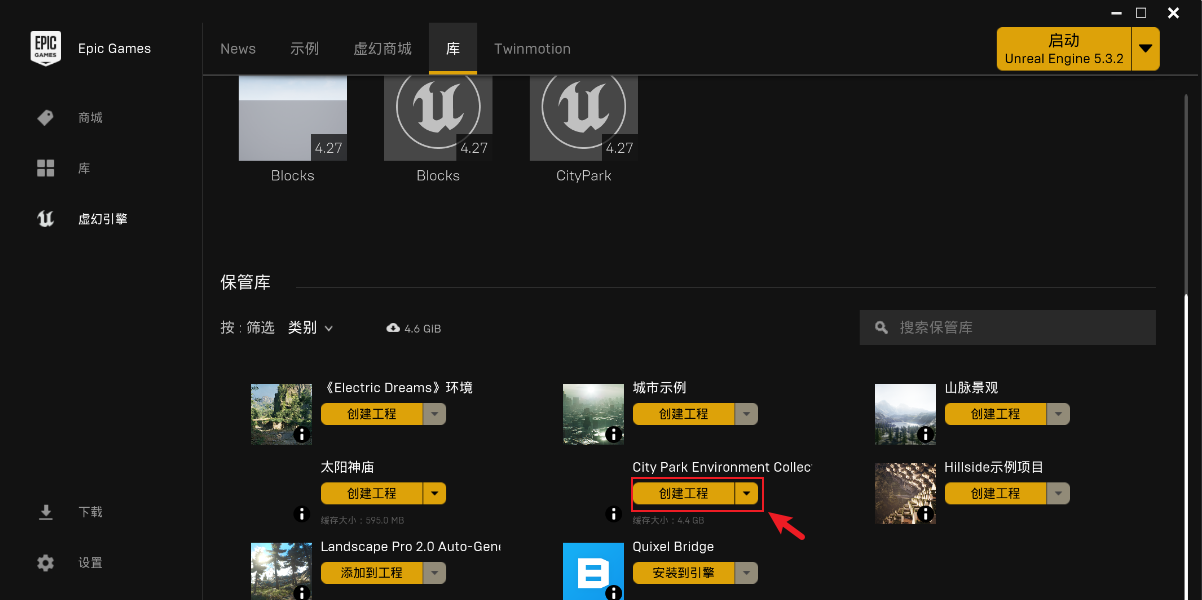
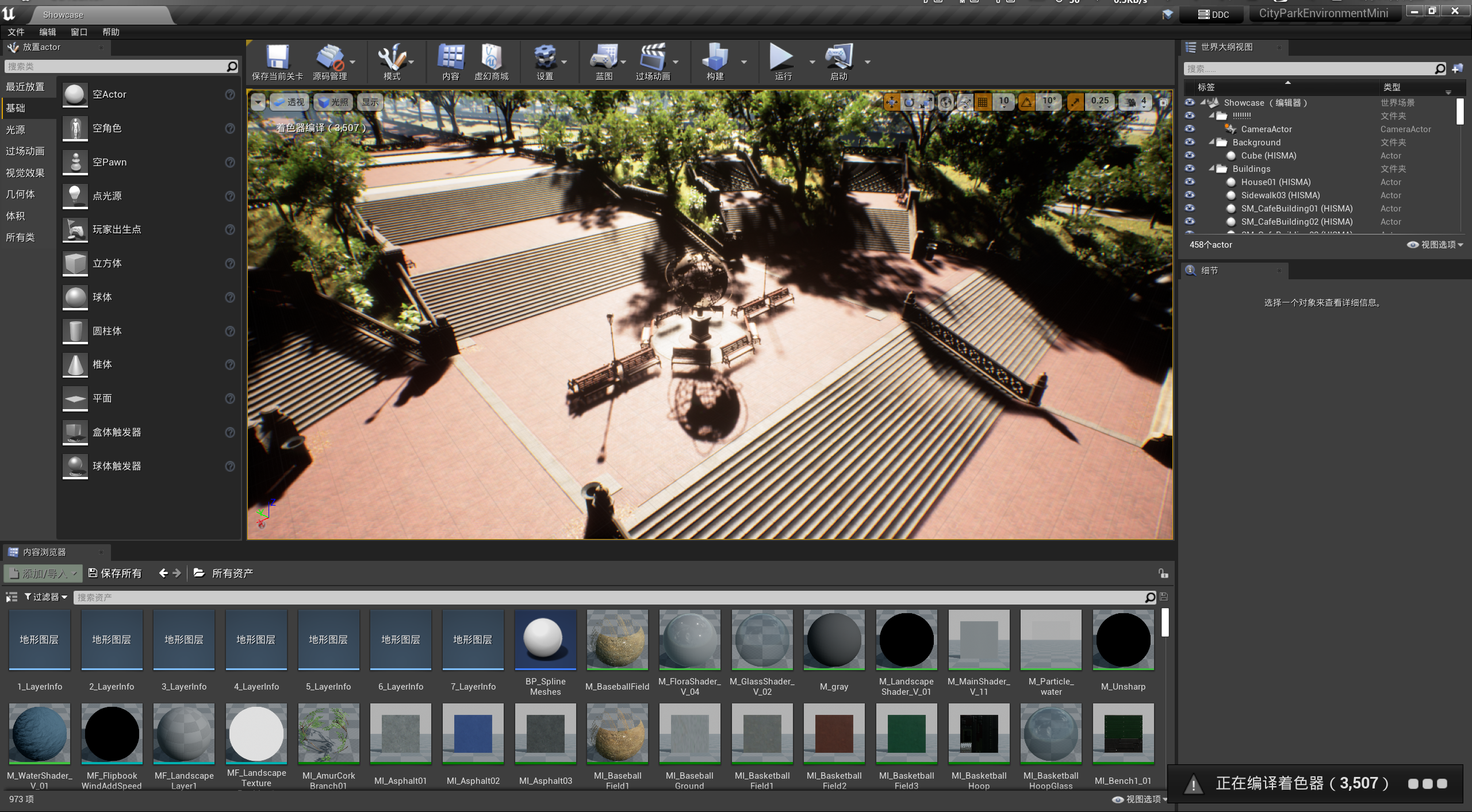
打开Epic -> 点击虚幻商城 -> 搜索环境类型的素材(推荐免费:搜索"Assetsville Town或City Park" -> 筛选结果选择免费 -> 添加致购物车进行购买)-> 点击上方的库,选择刚才购买的City Park创建工程,选定路径
导入完成后双击打开该工程
注:如果加载过程中黑屏或者卡住可以重启Unreal Engine,如果实在打开太卡或太慢可以选择上面购买City Park第二个那个轻量版地图
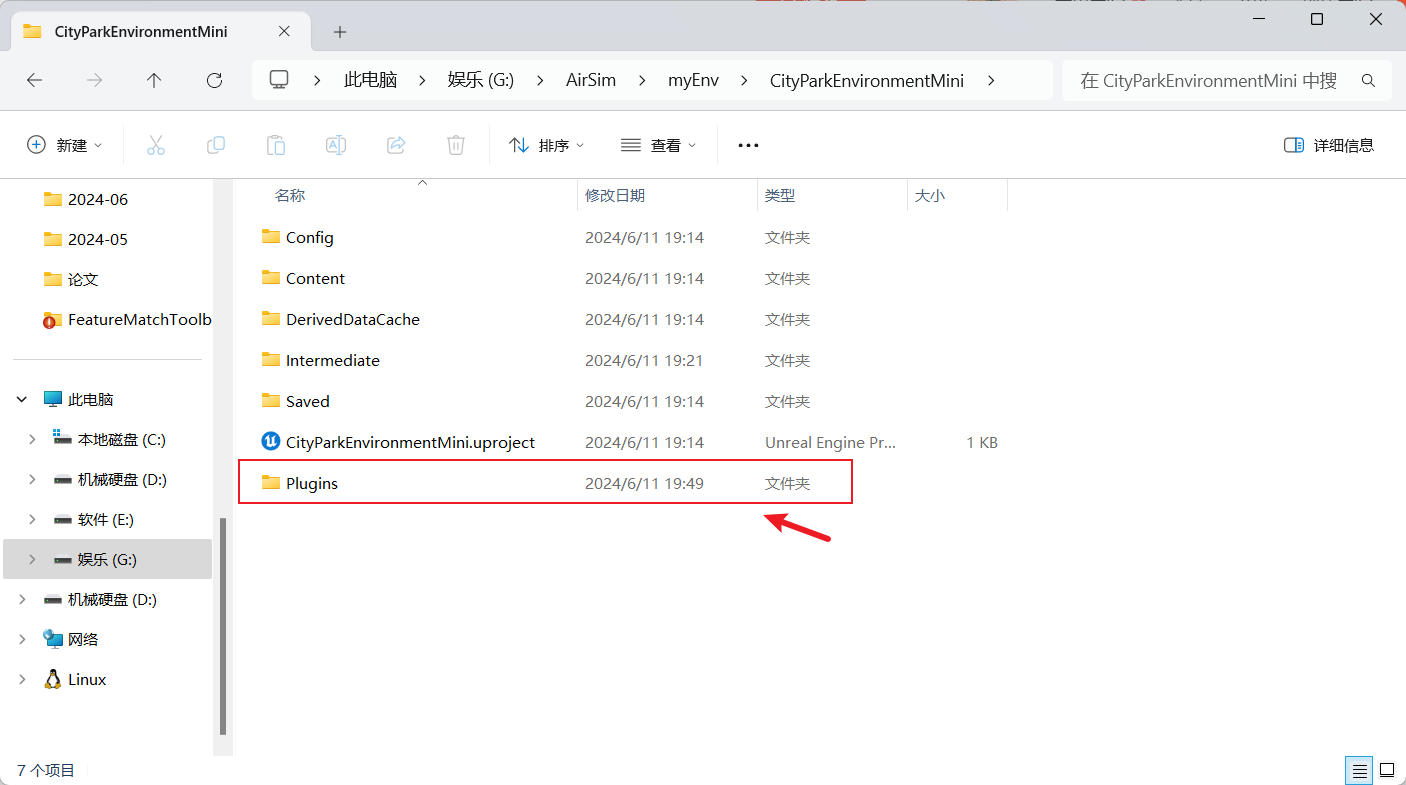
关闭工程,将
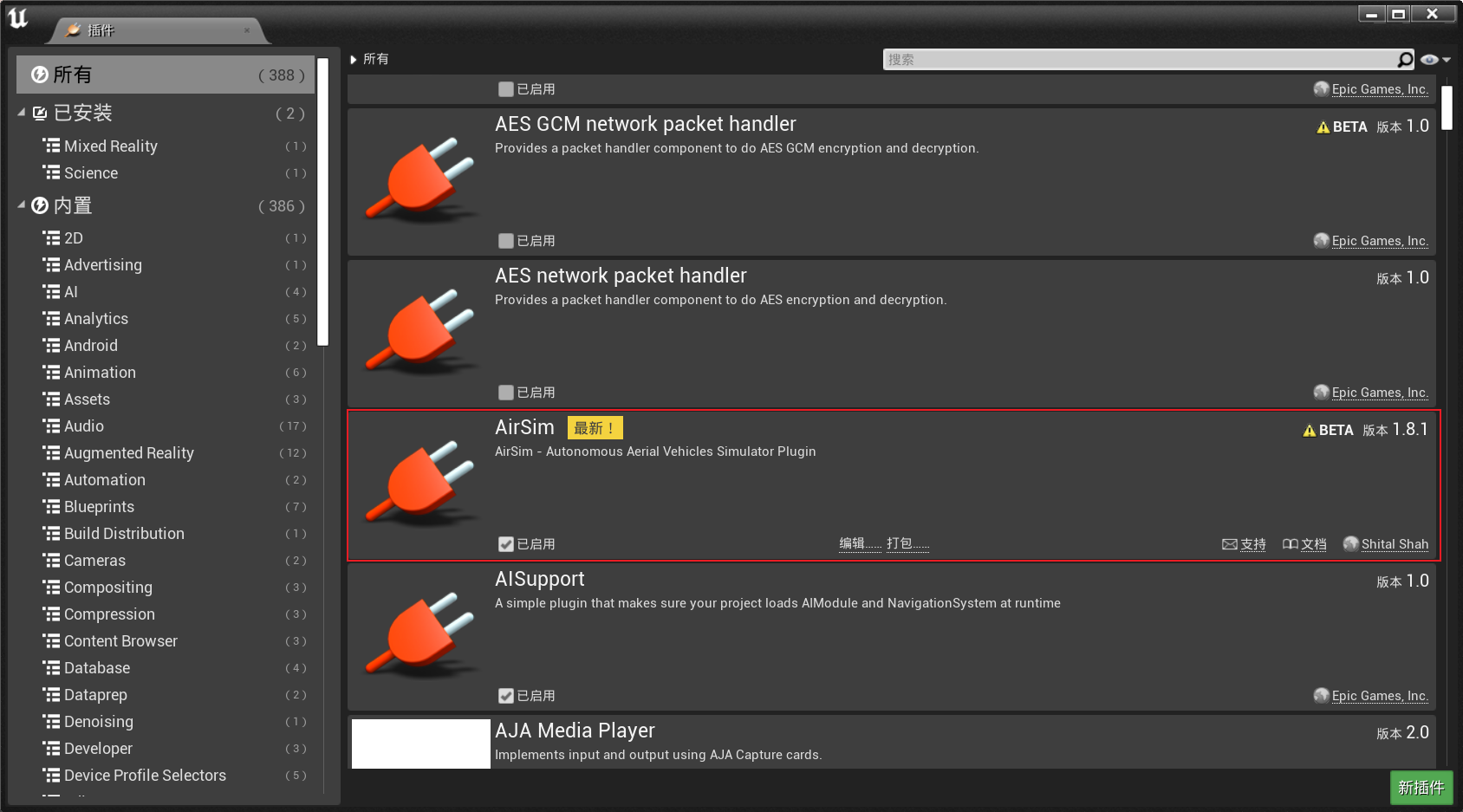
AirSim\Unreal\Plugins文件夹复制到刚才的工程目录下,然后双击CityParkEnvironmentMini.uproject,弹出Rebuild窗口,点击是重新编译完成后,右下角弹出更新插件,点击管理插件即可看到AirSim插件添加到工程中,然后点击功能栏的
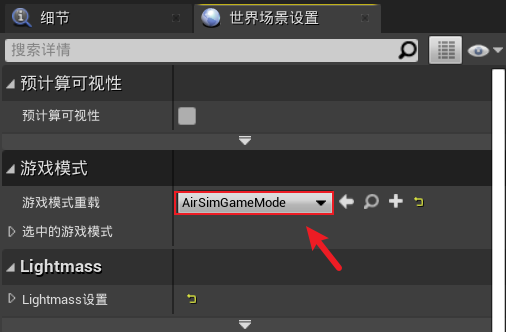
设置->世界场景设置-> 游戏模式重载选择AirSimGameMode点击运行,如果出现弹窗,选择
是启动车辆仿真,否启动无人机仿真,按F1查看帮助修改配置文件,前往
C:\User\{你的用户名}\Documents\AirSim\Settings.json,文件配置项参考https://microsoft.github.io/AirSim/settings/,以下是推荐的配置文件,需要搭配第二部分的设置使用,其中LocalHostIp为Windows本机的IP地址,通过cmd指令输入ipconfig进行查看,一般为192.168.1.x,或者其他,你可以通过WSL或者VM虚拟机ping一下看看通不通1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66{
"SettingsVersion": 1.2,
"SimMode": "Multirotor",
"ClockType": "SteppableClock",
"Vehicles": {
"PX4": {
"VehicleType": "PX4Multirotor",
"UseSerial": false,
"LockStep": true,
"UseTcp": true,
"TcpPort": 4560,
"ControlIp": "remote",
"ControlPortLocal": 14540,
"ControlPortRemote": 14580,
"LocalHostIp": "192.168.1.116",
"Sensors":{
"Barometer":{
"SensorType": 1,
"Enabled": true,
"PressureFactorSigma": 0.0001825
},
"Imu": {
"SensorType": 2,
"Enabled" : true,
"AngularRandomWalk": 0.3,
"GyroBiasStabilityTau": 500,
"GyroBiasStability": 4.6,
"VelocityRandomWalk": 0.24,
"AccelBiasStabilityTau": 800,
"AccelBiasStability": 36
},
"Gps": {
"SensorType": 3,
"Enabled" : true,
"EphTimeConstant": 0.9,
"EpvTimeConstant": 0.9,
"EphInitial": 25,
"EpvInitial": 25,
"EphFinal": 0.1,
"EpvFinal": 0.1,
"EphMin3d": 3,
"EphMin2d": 4,
"UpdateLatency": 0.2,
"UpdateFrequency": 50,
"StartupDelay": 1
},
"Distance": {
"SensorType": 5,
"Enabled" : true,
"MinDistance": 0.2,
"MaxDistance": 40,
"X": 0, "Y": 0, "Z": -1,
"Yaw": 0, "Pitch": 0, "Roll": 0,
"DrawDebugPoints": false
}
},
"Parameters": {
"NAV_RCL_ACT": 0,
"NAV_DLL_ACT": 0,
"COM_OBL_ACT": 1,
"LPE_LAT": 47.641468,
"LPE_LON": -122.140165
}
}
}
}
2. WSL2或者VM虚拟机环境配置
注:WSL或VM虚拟机需要如下环境
- ubuntu系统
- gcc>=8:
gcc -vsudo apt install gcc - ROS1或者ROS2:安装参考ROS 资源汇总
- PX4仿真:安装参考从0入门自主空中机器人-4-【PX4与Gazebo入门】
- QGC以及一些常见的软件:安装参考从0入门自主空中机器人-3-【环境与常用软件安装】
复制一份
AirSim工程目录到WSL或VM虚拟机1
2
3
4
5
6
7
8# Ubuntu18
sudo apt-get install ros-melodic-tf2-sensor-msgs ros-melodic-tf2-geometry-msgs ros-melodic-mavros*
# Ubuntu20
sudo apt-get install ros-noetic-tf2-sensor-msgs ros-noetic-tf2-geometry-msgs ros-noetic-mavros*
# 初试化AirSim
cd AirSim
sudo bash ./setup.sh
sudo bash ./build.sh编译ROS包
1
2
3
4
5
6# ROS1
cd AirSim/ros
catkin_make
# ROS2
cd AirSim/ros2
colcon build配置
~/.bashrc环境1
2
3
4
5# ip地址为运行airsim的Windows的ip
echo "export PX4_SIM_HOST_ADDR=192.168.1.116" >> ~/.bashrc
# 记得查看一下自己的路径对不对
echo "source ~/Airsim/ros/devel/setup.sh" >> ~/.bashrc
source ~/.bashrc开放防火墙(如果没有装防火墙就不需要这一步了)
1
2sudo ufw allow 4560
sudo ufuw allow 10049
在Window中启动AirSim(记得修改配置文件后重新启动),窗口显示等待TCP连接
在WSL或者VM虚拟机中启动
PX4仿真和ROS&rivz1
2cd ~/PX4-Autopilot
make px4_sitl_default none_iris出现下面的提示则说明PX4与AirSim连接成功
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21PX4 SIM HOST: 192.168.1.117
INFO [simulator] Simulator using TCP on remote host 192.168.1.117 port 4560
WARN [simulator] Please ensure port 4560 is not blocked by a firewall.
INFO [simulator] Waiting for simulator to accept connection on TCP port 4560
INFO [simulator] Simulator connected on TCP port 4560.
INFO [commander] LED: open /dev/led0 failed (22)
INFO [init] Mixer: etc/mixers/quad_w.main.mix on /dev/pwm_output0
INFO [init] setting PWM_AUX_OUT none
INFO [mavlink] mode: Normal, data rate: 4000000 B/s on udp port 18570 remote port 14550
INFO [mavlink] mode: Onboard, data rate: 4000000 B/s on udp port 14580 remote port 14540
INFO [mavlink] mode: Onboard, data rate: 4000 B/s on udp port 14280 remote port 14030
INFO [mavlink] mode: Gimbal, data rate: 400000 B/s on udp port 13030 remote port 13280
INFO [logger] logger started (mode=all)
INFO [logger] Start file log (type: full)
INFO [logger] [logger] ./log/2024-06-12/08_20_41.ulg
INFO [logger] Opened full log file: ./log/2024-06-12/08_20_41.ulg
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
pxh> INFO [tone_alarm] home set
INFO [tone_alarm] notify negative启动
ROS&rivz1
2roslaunch airsim_ros_pkgs airsim_node.launch output:=screen host:=$PX4_SIM_HOST_ADDR
roslaunch airsim_ros_pkgs rviz.launch通过
rostopic list查看有没有一下主题即可说明是否连接正常1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18laohanba@ubuntu:~/Airsim$ rostopic list
/airsim_node/PX4/altimeter/Barometer
/airsim_node/PX4/distance/Distance
/airsim_node/PX4/environment
/airsim_node/PX4/global_gps
/airsim_node/PX4/gps/Gps
/airsim_node/PX4/imu/Imu
/airsim_node/PX4/magnetometer/magnetometer
/airsim_node/PX4/odom_local_ned
/airsim_node/PX4/vel_cmd_body_frame
/airsim_node/PX4/vel_cmd_world_frame
/airsim_node/gimbal_angle_euler_cmd
/airsim_node/gimbal_angle_quat_cmd
/airsim_node/origin_geo_point
/rosout
/rosout_agg
/tf
/tf_static

各个话题和订阅者功能如下:
Publishers:#
/airsim_node/origin_geo_pointairsim_ros_pkgs/GPSYaw 与全球 NED 框架相对应的 GPS 坐标。这将在 airsim 的 settings.json 文件中的OriginGeopoint键下进行设置
/airsim_node/VEHICLE_NAME/global_gpssensor_msgs/NavSatFix 这是无人机在 airsim 中的当前 GPS 坐标
/airsim_node/VEHICLE_NAME/odom_local_nednav_msgs/Odometry NED 框架(默认名称:oddom_local_ned,发射名称和框架类型可配置)中与起飞点的测距。
/airsim_node/VEHICLE_NAME/CAMERA_NAME/IMAGE_TYPE/camera_infosensor_msgs/CameraInfo
/airsim_node/VEHICLE_NAME/CAMERA_NAME/IMAGE_TYPEsensor_msgs/Image RGB 或浮点图像,取决于 settings.json 中要求的图像类型。
/airsim_node/VEHICLE_NAME/altimeter/SENSOR_NAMEairsim_ros_pkgs/Altimeter 这是高度计当前的高度、压力和温度读数 QNH
/airsim_node/VEHICLE_NAME/imu/SENSOR_NAMEsensor_msgs::Imu IMU 传感器数据
/airsim_node/VEHICLE_NAME/magnetometer/SENSOR_NAMEsensor_msgs::MagneticField 测量磁场矢量/罗盘
/airsim_node/VEHICLE_NAME/distance/SENSOR_NAMEsensor_msgs::Range 测量与活动者的距离,如红外线或红外信号
/airsim_node/VEHICLE_NAME/lidar/SENSOR_NAMEsensor_msgs::PointCloud2 激光雷达点云Subscribers:#
/airsim_node/vel_cmd_body_frameairsim_ros_pkgs/VelCmd 忽略vehicle_name字段,将其留空。今后我们将对多架无人机使用vehicle_name字段
/airsim_node/vel_cmd_world_frameairsim_ros_pkgs/VelCmd 忽略vehicle_name字段,将其留空。今后我们将对多架无人机使用vehicle_name字段
/gimbal_angle_euler_cmdairsim_ros_pkgs/GimbalAngleEulerCmd 以欧拉角为单位的万向节设定点
/gimbal_angle_quat_cmdairsim_ros_pkgs/GimbalAngleQuatCmd 以四元数表示的万向节设定点
/airsim_node/VEHICLE_NAME/car_cmdairsim_ros_pkgs/CarControls 油门、刹车、转向和档位选择控制。可控制自动和手动变速箱,使用方法请参见car_joy.py脚本Services:#
/airsim_node/VEHICLE_NAME/landairsim_ros_pkgs/Takeoff
/airsim_node/takeoffairsim_ros_pkgs/Takeoff
/airsim_node/resetairsim_ros_pkgs/Reset 重置所有无人机Parameters:#
/airsim_node/world_frame_id[string] Set in:$(airsim_ros_pkgs)/launch/airsim_node.launch默认值:world_ned 设置为 "world_enu "可自动切换到 ENU 框架
/airsim_node/odom_frame_id[string] Set in:$(airsim_ros_pkgs)/launch/airsim_node.launch默认值: odom_local_ned 如果将 world_frame_id 设置为 “world_enu”,则默认 odom 名称将改为 “odom_local_enu”
/airsim_node/coordinate_system_enu[boolean] Set in:$(airsim_ros_pkgs)/launch/airsim_node.launch默认值:false 如果将 world_frame_id 设置为 “world_enu”,该设置将默认为 true
/airsim_node/update_airsim_control_every_n_sec[double] Set in:$(airsim_ros_pkgs)/launch/airsim_node.launch默认值:0.01 秒。计时器回调频率,用于从 airsim 更新无人机 Odom 和状态,以及发送控制命令。当前 RPClib 与虚幻引擎的接口最大频率为 50 赫兹。ROS 中的定时器回调以最大速率运行,因此最好不要触及此参数
/airsim_node/update_airsim_img_response_every_n_sec[double] Set in:$(airsim_ros_pkgs)/launch/airsim_node.launch默认值:0.01 秒。从 airsim 中所有摄像机接收图像的定时器回调频率。速度取决于请求图像的数量和分辨率。ROS 中的定时回调以最大可能的速度运行,因此最好不要触及此参数
/airsim_node/publish_clock[double] Set in:$(airsim_ros_pkgs)/launch/airsim_node.launch默认值:false 设置为 true 时,将发布 ros /clock 主题
注:启动PX4连接成功后,可以通过QGC地面站一键起飞无人机














